 workshop 星工聚将分享照片
workshop 星工聚将分享照片
美西时间4月27日,一场聚焦具身智能与机器人创业的workshop在斯坦福校园内举行。四位来自不同领域的嘉宾——产业创业者、前沿研究者、AI工程师与资深投资人,分别从技术路线、算法演进、中美对比和资本逻辑等角度,展开了一场跨界的深度对话。
以下是星工聚将团队在workshop的核心节选。(为了方便阅读,做了文本优化)
01
李梓正 · 星工聚将打造通用泛化本体
 星工聚将总经理 · 李梓正 演讲照片
星工聚将总经理 · 李梓正 演讲照片
 蒋青原演讲照片
蒋青原演讲照片
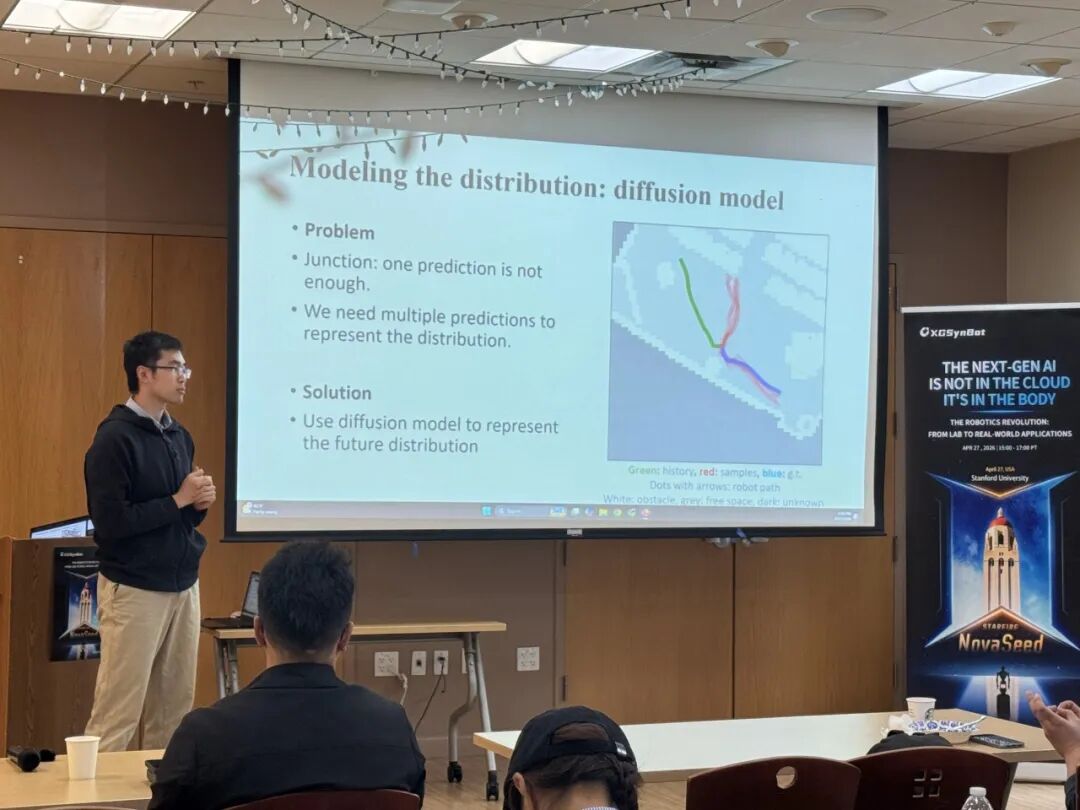
蒋青原,清华大学机械工程系本科、MIT博士,现为苹果Camera-Incubation组机器学习工程师。他以“像摄影师一样规划路径”为主题,分享了博士期间正在研究的无人机跟拍技术的演进之路。他指出,当环境复杂且人的行为存在多种可能性时,单一的预测假设会失效,需要用扩散模型来表征未来多模态的概率分布,并通过实时迭代,进行动态调整。
这对于机器人的路径规划同样适用,他认为,不应将所有问题都丢给端到端的大模型暴力解决,要善于将过去几十年的机器人领域经典工作与现代模型相结合。同时,数据的分布是否覆盖了边缘场景,往往比数据量本身更重要。
03
Zhuotun Zhu · 算法与制造的中美博弈
 Zhuotun Zhu 演讲照片
Zhuotun Zhu 演讲照片
Zhuotun Zhu,机器学习高级工程师,Johns Hopkins 计算机博士,师从斯坦福机器人之母李飞飞同门师哥、霍金学生。他曾先后在英伟达、微软工作,现任职于Qbio,主导医疗器械人工智能系统的研发。
他对美国人工智能的前沿动态有密切的关注,对中美机器人发展路径做了清晰的对比:
美国在做“大脑”,追求通用人工智能的突破,走的是AI first路线——先在大规模数据上训练基模,再用强化学习做post alignment对齐具体任务。
而中国在做“身体”,依靠发达的制造业先将产品低成本、大规模地铺开,再基于海量用户反馈数据快速迭代,走的是工程驱动路线。虽然现在中国与美国在算法上还是有一定差距,但是通过这种路线,中美模型之间的gap正在补齐。
总的来说,未来机器人领域的竞争将是AI算法能力与制造业能力的综合竞争。
另外,在AI竞争力的排序上,他认为:数据 > Infra(基础设施) > 算法 > 人才。
- 数据:排第一,高质量且大规模的数据,能够显著缩小不同模型之间的性能差距。
- Infra:数据决定了模型的上限,而Infra决定了你多快能到达那个上限。
- 算法:Claude code等AI工具的出现加速了算法的迭代,缩小了算法效率的差距。
- 人才:企业可以通过财力引进人才,补齐技术壁垒。
04
刘敏 · 机器人企业的创业投资逻辑
 刘敏演讲照片
刘敏演讲照片
刘敏(Allen Liu),AI 创投平台——硅谷科技评论 SVPR创始人,曾在亚马逊帮中国企业出海。他结合多年的投资经验,从资本视角拆解了机器人企业的创业逻辑。他指出本轮机器人创业的本质是AI进入物理世界的接口,行业正经历三大迁移:从硬件交付到软件持续迭代、从Demo演示到真实数据闭环、从单点产品到全球产业链竞争。 在投资落地上,他总结了三类受资本青睐的方向:讲前沿叙事、讲商业化落地(ROI)、讲基础设施。 他特别强调,具身智能的核心不是做单个零部件,而是构建数据飞轮形成闭环。理想的创始团队需兼具模型、硬件、行业认知与场景落地能力。而判断一家机器人公司的关键不是能否干活,而是能否越做越好,能否持续优化迭代。机器人不是终点,能持续学习、规模化部署、创造价值的物理世界智能系统才是。
——
从技术攻坚到场景落地,从数据闭环到产业链竞争与合作,四位嘉宾的分享共同指向一个判断:具身智能的竞争早已不只是单项能力的比拼,而是一场关于“持续学习、规模化部署、创造价值”的综合较量。
